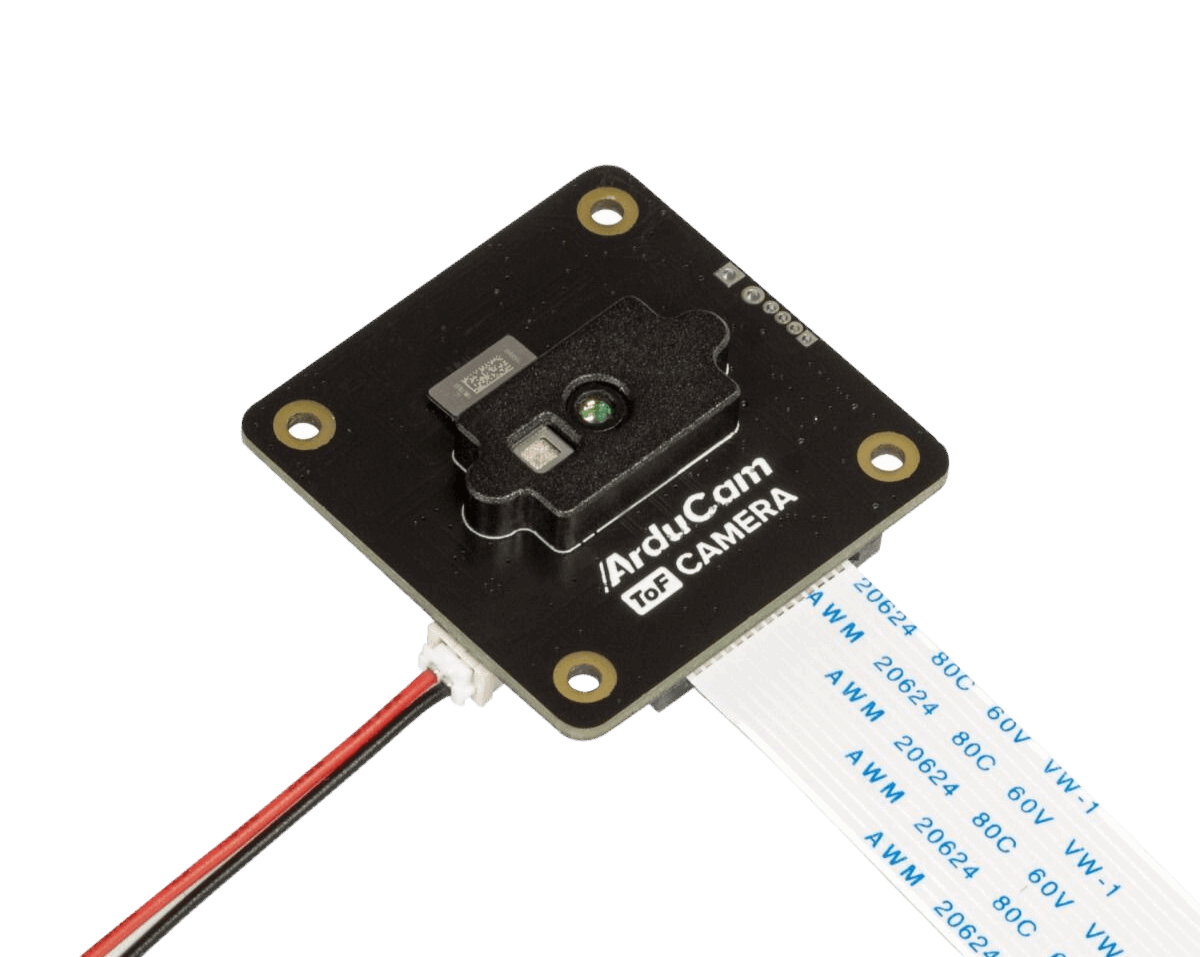
Arducam
ToF Camera for Raspberry Pi & Jetson Nano
SKU: B0410
Couldn't load pickup availability
Shipping & Returns
Shipping & Returns
Shipping
Free shipping to all UK addresses (subject to a minimum order value of £20).
Standard shipping to all other destinations - select destination on checkout to get pricing.
Taxes may apply to your order depending on the shipping destination. Please note that the customer is responsible for any applicable taxes and duties. Goods are shipped with incoterms DAP.
Returns
If you would like to return or have any questions about your returning your item, please contact returns@scorpion.vision
Specification
| Camera Specs |
B0410 |
|---|---|
| Sensor | ToF |
| Sensor Size |
1/6" |
|
Resolution |
240 × 180 |
| Max. Depth Frame Rate (Raspberry Pi) | 30fps, 4-phase |
| Max. Depth Frame Rate (Nvidia Jetson**) | 30fps, 4-phase |
| Viewing Angle |
70° |
| Measurement Distance | Far Mode: 4m Near Mode: 2m |
| Light Source | 940nm VCSEL illuminator |
| Output Formats | 4-phases RAW Frame, Depth Frame, Grayscale Amplitude Frame |
| Dimension | 38 × 38mm |
Overview
-
Pixel-level accuracy: powerful depth/distance measurement
- Broad working range: cable extension kit providing extra coverage of 2m, 4m and 10m
- Usable outdoors: There is no need to worry about any disruptions caused by the presence of ambient light
-
Any MV library works: Usable with 3 languages, C, C++ and Python
Exclusively designed and optimised for Raspberry Pi & Nvidia Jetson boards, this Time of Flight camera module boasts a MIPI-CSI 2 connection and provides a measuring range of up to 4 meters with a remarkable sub-2cm precision.
Raspberry Pi OS Bullseye is required for this camera (04/04/2022 or later releases), a fresh install is highly recommended.
Looking to extend your solution? You can interface the camera with GigE using the 15M extension kit.
If you would like to use it on the Pi Zero and Pi Zero 2 W, you will need the B0210.
What is Time-Of-Flight?
Time of Flight (TOF) technology is a cutting-edge imaging technique used in the camera industry to capture three-dimensional images and measure distances in real time. This advanced technology utilises a pulse of light, typically an infrared laser, to illuminate a scene and measures the time it takes for the light to reflect off of objects and return to the camera. This information is then used to create a detailed depth map of the scene, enabling the camera to determine the distance between the camera and each object in the frame.